
Lund University Students 3D Print Mobile Concrete Furniture and Public Art
This project began through a conversation with Helsingborg Hem, the Helsingborg city department responsible for providing housing to its citizens, who were interested in working with Lund University on developing a demo 3D printer machine to print houses. However, as with many projects undertaken without a budget, the Additive Manufacturing research team at Lund University had access to a spare ABB robot arm, so they decided to start with a smaller scale proof-of-concept system that was capable of printing street furniture, or public artworks. The idea was for a 3D printer that could be quickly wheeled into position, locked down, print a concrete bench, for example, and then be moved to the next spot to print the next object. 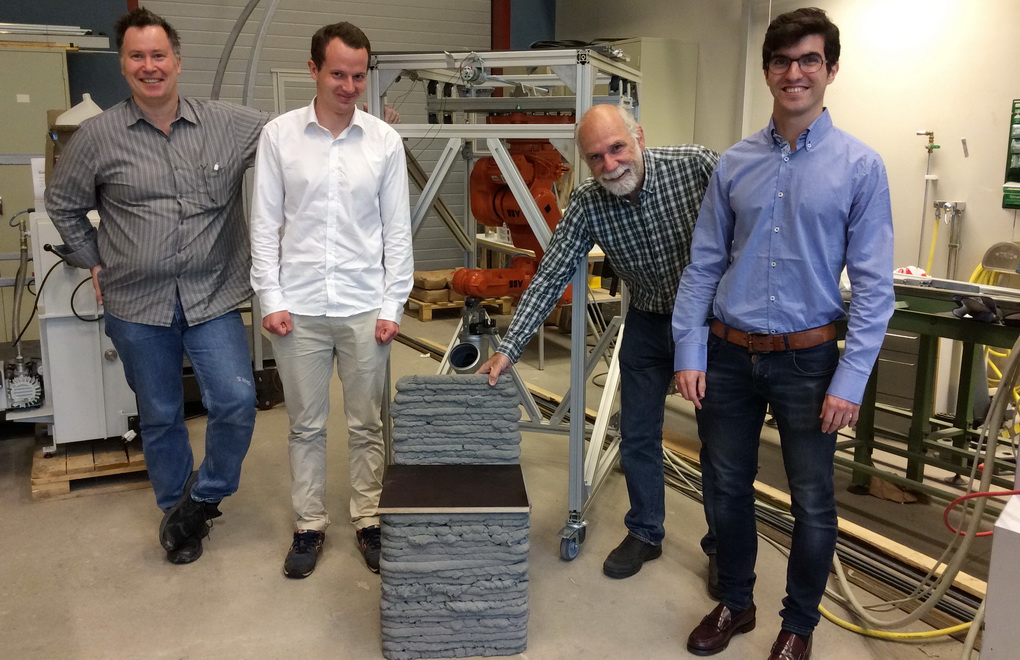 The Concrete 3D printer team: Prof Olaf Diegel, Lars Henrik Anell, A. Prof. Giorgos Nikoleris, and Borja Serra |
|
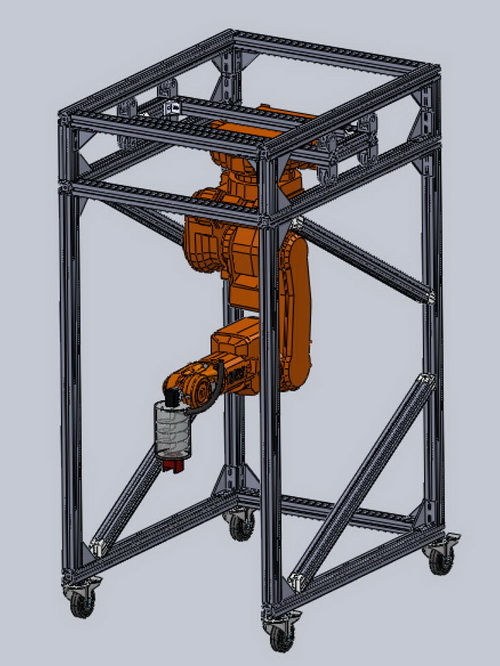
A brief was given to two Masters students, Borja Serra and Lars Henrik Anell, to transform the ABB IRB140 robot into a mobile 3D printer capable of printing street furniture, or public art works, in concrete. They divided up the work into two sub-projects, with Borja taking care of the 3D printer frame design, and the software and programming of the robot, and Henrik taking care of the design and construction of the concrete print-head. Here is some of what they came up with: 3D Printer Frame:
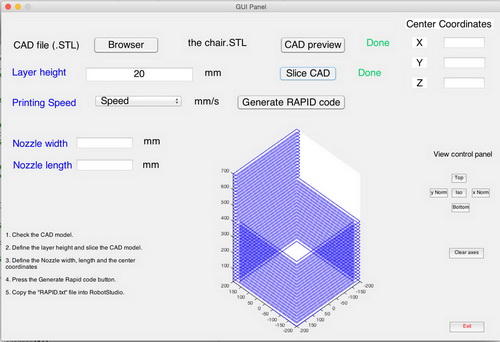
Software:
|
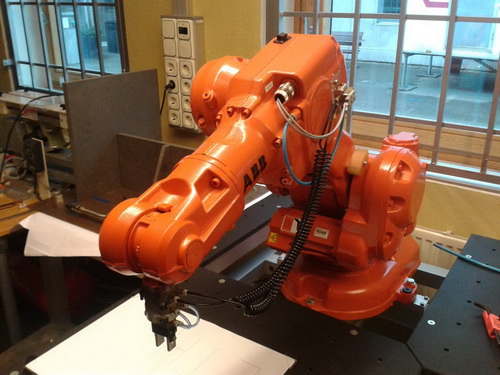
Print-head:
Concrete Print-head Design: |
And here's the printer in action printing a small wall:
The proof-of-concept printer successfully printed the objects shown below. Future work includes improving the concrete feeding system, adding paddles to smooth the objects being printed, maybe replace the robot arm wiht a gantry type system to allow bigger prints, etc. This is an on-going project, so stay tuned to see what the next students come up with. |
And the assembled printer with a pipe feeding concrete to the print-head:
|
  
|
|
And here's a video video clip, taken by Borja and Henrik, showing the printer in action. Note that this video is from the early testing phase, before a concrete feeder system had been added, so the concrete was manually shoveled into the print-head.
|
|




copyright 2011, olaf diegel